| 产品特性:地磁传感器 | 品牌:PNI sensor | 型号:RM3100 |
| 传感器类型:磁感应 | 功能类型:磁场测量 | 感应范围:±800μt |
| 工作点(BOP):1 | 释放点(BRP):800 | 系列:RM3000 |
| 输出类型:数字I2C SPI | 电源电压:3V | 电源电流:50mA |
| 安装类型:表贴 | 封装/外壳:SMD | 工作温度:85℃ |
| 最小包装数:2500 | 应用领域:***/航天 |
Oculus融合算法
目前卡尔曼滤波和例子滤波都存在一定的局限性,比较好的选择是互补滤波算法,它的代码实现在openHMD中ofusion_update接口中。
注:openHMD中的oculus融合算法(已更新于2016.12.01),我们曾经把它应用到项目当中,后来发现这部分算法不包含航向偏移校正。
互补滤波算法
MIT上发表的互补滤波算法的原理和基于Android平台的算法实现,很完整的算法,oculus的算法也是基于互补滤波的,个人认为目前入门融合算法的选择MIT互补滤波算法。
AHRS
在四轴飞行器论坛上,比较多人使用AHRS开源融合算法。

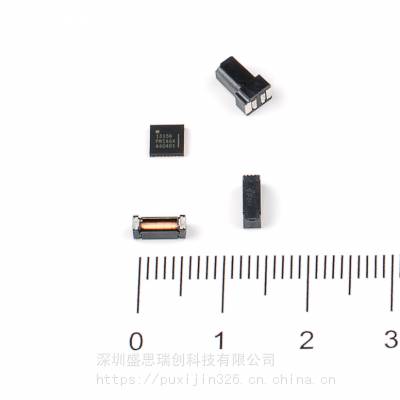
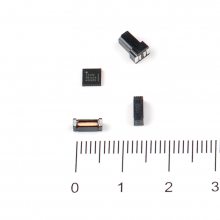
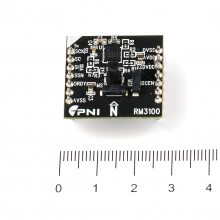
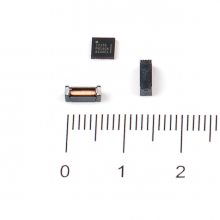
RM3100(PNI磁传感器组件)
RM3100磁传感器套件是由2个XY轴磁传感器Sen-XY-f(13104),1个Z轴磁传感器Sen-Z-f(13101)和1个ASIC控制器MagI2C(13156)组成。
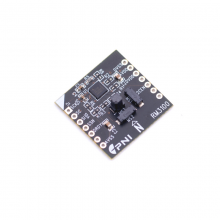
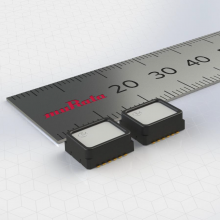
SENtral(9轴运动传感器数据融合芯片)
TRAX(AHRS姿态检测系统TRAX模块)
TargetPoint(美国PNI三轴电子罗盘TargetPoint DMC系列模块)
SpaceScout(9轴姿态检测传感器)
SeaTRAX(PNI三轴电子罗盘SeaTRAX系列)
V2XE(PNI低功耗2轴罗盘模块)
Prime(PNI三轴电子倾角补偿电子罗盘)
TCM-XB(PNI TCM系列电子罗盘)pn12810
SENtral M&M(9轴姿态检测模块)
PN13156
PN13104
PN13101
RM3100
TCM-XB
PN12810
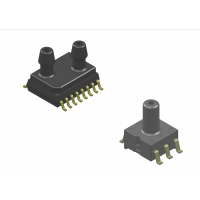
NPC-1210-10WD-3S
NPC-1210-001D-3S
NPC-1210-005D-3S
NPC-1210-015A-3S
NPI-19A-021GH
NPI-19A-031GH
NPA-700B-10WD
NPA-700B-001D
NPA-700B-015A
SM5651-001-D-3-SR
SM5651-003-D-3-SR
SM5651-008-D-3-SR
SM5651-015-D-3-SR
SM5852-001-D-3-LR
SM5852-003-D-3-LR
SM5852-015W-D-3-LR
SM9541-010C-S-C-3-S
SM9541-010C-D-C-3-S
SM9541-020C-S-C-3-S
SM9541-020C-D-C-3-S
DLC-L01D-D4
DLC-L02D-D4
DLC-L05D-D4
DLC-L10D-D4
DLC-L20D-D4
DLC-L30D-D4
DLC-L60D-D4
DLC-005D-D4
DLC-015D-D4
DLC-030D-D4
DLC-100D-D4
DLC-150D-D4
0.5 INCH-D-MV
1 INCH-D-MV
2 INCH-D-MV
5 INCH-D-MV
10 INCH-D-MV
20 INCH-D-MV
30 INCH-D-MV
1 INCH-D-4V
1 INCH-G-4V
2.5 INCH-D-4V
2.5 INCH-G-4V
5 INCH-D-4V
5 INCH-G-4V
10 INCH-D-4V
10 INCH-G-4V
20 INCH-D-4V
20 INCH-G-4V
30 INCH-D-4V
30 INCH-G-4V
40 INCH-G-4V
60 INCH-G-4V
0.25 INCH-D-4V
0.25 INCH-G-4V
0.5 INCH-D-4V
0.5 INCH-G-4V